一、产品特点
DC7-30V;
继电器输出触点隔离;
大电流控制继电器;
通讯接口支持 RS485 或 RS232;
通信波特率:2400,4800,9600, 19200,38400(可以通过软件修改,默认 9600);
通信协议:支持标准modbus RTU 协议;
可以设置 0-255 个设备地址,可以通过软件设置;
具有闪开、闪断功能,可以在指令里边带参数、操作继电器开一段时间 自动关闭;
具有频闪功能,可以控制器继电器周期性开关。
二、产品功能
四路继电器控制输出;
八路光耦隔离输入(5-24V);
支持手动控制模式;
支持本机非锁联动模式;
支持本机自锁联动模式;
支持互锁模式;
双机非锁联动模式;
双机自锁联动模式。
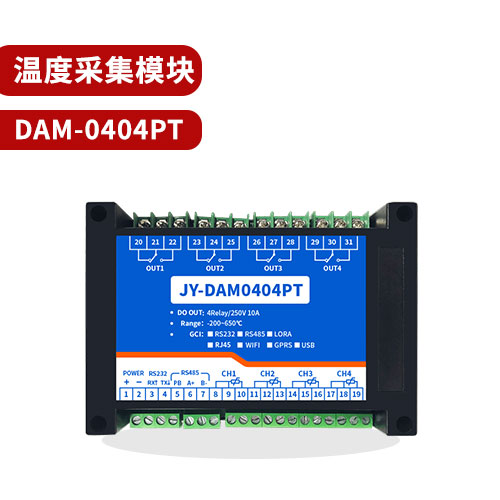
三、产品选型
型号 | modbus | RS232 | RS485 | USB | WiFi | 继电器 | 输入 |
DAM0408DI-RS232/485 | ● | ● | ● |
|
| 4 | 8 |
四、主要参数
参数 | 说明 |
触点容量 | 30A/30VDC 30A/250VAC |
耐久性 | 10万次 |
数据接口 | WIFI、网口 |
额定电压 | DC 7-30V |
电源指示 | 1路红色 LED 指示 |
输出指示 | 4路红色 LED 指示 |
温度范围 | 工业级,-40℃~85℃ |
尺寸 | 145*94*41mm |
重量 | 330g |
默认通讯格式 | 9600,n,8,1 |
波特率 | 2400,4800,9600, 19200,38400 |
软件支持 | 配套配置软件、控制软件;支持各家组态软件; 支持 Labviewd 等 |
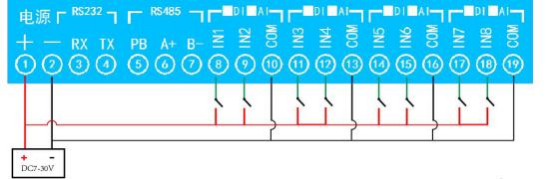
五、接口说明

六、输入输出接线
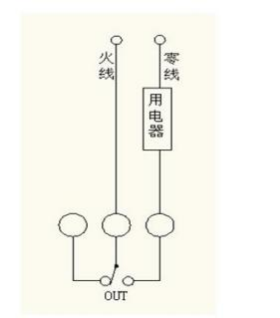
1、继电器接线说明
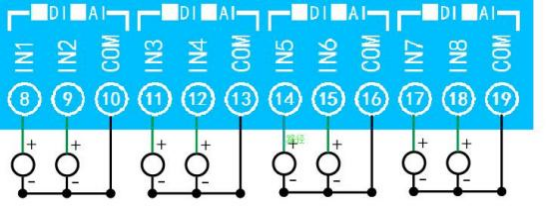
2、有源开关量接线示意图
3、无源开关量接线示意图
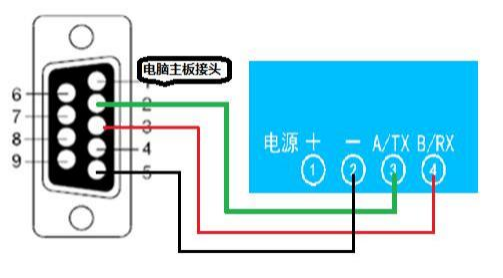
七、通讯接线说明
1、RS485 级联接线方式
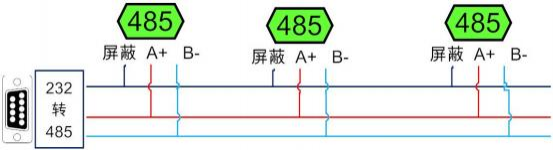
电脑自带的串口一般是 RS232 ,需要配 232-485 转换器(工业环境建议使用有源带隔离的转 换器) ,转换后 RS485 为 A 、B 两线,A
接板上 A 端子,不接板上 B 端子,485 屏蔽可以 接 GND 。若设备比较多建议采用双绞屏蔽线,采用链型网络结构。
2、RS232 接线连接方式
八、测试软件说明
1、软件下载
https://www.juyingele.com.cn/software/ 聚英翱翔 DAM 调试软件使用教程.rar (软件视频教程连接)
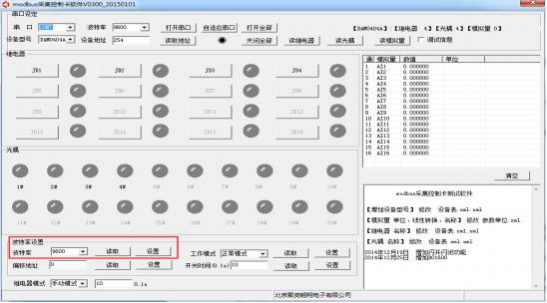
2、软件界面

3、软件功能
继电器状态查询
继电器独立控制
模拟量读取
开关量状态查询
调试信息查询
工作模式的更改
偏移地址的设定
继电器整体控制
4、通讯测试
1 选择设备当前串口号,打开串口;
2 选择对应的产品型号;
3 设备地址修改为 254 ,点击“读取地址 ”,软件底部提示“读取成功 ”,读到的设备地 址为“0
”,软件右下方的发送和指令正确,则说明设备与电脑通讯成功。

九、工作模式功能及设置
1、连接设备
https://www.juyingele.com.cn/software 聚英翱翔 DAM 调试软件使用教程.rar (软件视频教程连接)
打开“聚英翱翔 DAM 调试软件 ”;串口设定栏:串口选择您电脑对应 COM 口,波特率选择设备默认波特率(9600)(未自己设置过波特率前),设备地址
填写“254 ”(254 为设备的广播地址),设备型号选择相对应型号,设置好以 上设备的 4 个参数后点击打开串口,点击继电器按钮“JD1
”若继电器反应则连接成功。
2、设备地址的更改方法
2.1 、设备地址的介绍
设备偏移地址是指在拨码开关地址基础上进行偏移,具体关系是:设备地址=拨 码开关地址+偏移地址。
注意:本设备是没有拨码开关的设备,所以设备地址 = 偏移地址。
2.2 、设备地址的读取
点击软件上方“读取地址 ”

2.3 、偏移地址的设定与读取
点击软件下方偏移地址后边的“读取 ”或“设置 ”来对设备的偏移地址进行 读取或设置。
2.4 、波特率的读取与设置
点击下方波特率设置栏的“读取 ”和“设置 ”就可以分别读取和设置波特率和地址,操作后需要重启设备和修改电脑串口设置。

3、工作模式
3.1 工作模式说明
3.1.1 、本机非锁联动模式
本身带有光耦输入和继电器输出的板卡模块,在该模式下,输入光耦与继电 器为直接联动。即:光耦输入信号生效—>对应继电器吸合,光耦输入信号取消
—>对应继电器断开。
该模式下因为机械及程序的延迟,光耦输入信号到继电器动作会有一定的延 迟,但最大不会超过 0.05 秒。
由于该模式下所有继电器直接受光耦联动,所以会出现串口无法操作继电器 的现象,这并不是异常现象,而是串口操作继电器后,在继电器还为动作之前就
被光耦的状态联动了。
3.1.2 、本机自锁联动模式
模块本身带有光耦输入和继电器输出的板卡模块,在该模式下,光耦每输入 一次信号,对应的继电器翻转一次。即:
光耦输入信号生效—>继电器翻转(吸合变断开、断开变吸合);
光耦输入信号取消—>继电器不动作;
该模式同样存在非锁模式的延迟问题,但是延迟时间同样不会大于 0.05 秒。
该模式主要可以用于外部信号触发来控制设备启停的场合,例如光耦外接一 个按钮,对应的继电器外接用电设备,则每按一次按钮,设备就会切换一次启停 状态。
3.1.3 、互锁模式
模块本身带有光耦输入和继电器输出的板卡模块,在该模式下,光耦每输入 一次信号,对应的继电器会吸合,其他未输入信号光耦对应继电器会断开。即:
光耦输入信号生效—>对应继电器吸合其它继电器断开;
光耦输入信号取消—>继电器不动作;
该模式同样存在非锁模式的延迟问题,但是延迟时间同样不会大于 0.05 秒。 该模式主要可以用于外部信号触发来控制不同设备启停的场合,例如多路光
耦没路外接一个按钮,对应的继电器外接用电设备,则按一路按钮,对应设备就 会切换到启动状态,其它设备就会停止运行。
3.1.4 、双机非锁联动模式
该模式需要两个地址相同、模式相同的设备完成,两个设备通过直连 485 或 者交叉 232 连接起来之后,模块 1 的光耦状态会直接控制模块 2
的对应继电器的 状态,即:
模块 1 的 1 号光耦输入信号生效—>模块 2 的 1 号继电器吸合
模块 1 的 1 号光耦输入信号消失—>模块 2 的 1 号继电器断开
该模式下的继电器相应延迟时间较前几种的模式要长,但不会大于 0.1 秒 (9600 波特率)
该模式下如果使用485 总线的话可以并联多个设备,其中设备两两地址匹配, 这样可以做到远程的开关量传输。例如:现场有多个低速的开关量需要传输到 500
米外的控制机房去控制告警灯或者电铃,则只需在厂房布置几个模块通过两 根双绞屏蔽线连接到机房的对应模块,就可以完成该任务。同理也可以把机房操
作的按钮信号信号直接传送到位于机房模块的继电器上。
3.1.5 、双机自锁联动模式
该模式需要两个地址相同、模式相同的设备完成,两个设备通过直连 485 或 者交叉 232 连接起来之后,模块 1 的光耦状态生效会翻转控制模块 2
的对应继电 器的状态,即:
模块 1 的 1 号光耦输入信号生效—>模块 2 的 1 号继电器翻转
模块 1 的 1 号光耦输入信号消失—>模块 2 的 1 号继电器不动作
该模式的应用与“双机非锁联动 ”模式类似,但更适合于远程控制设备的启 停,只需在操作端安装一个按钮即可实现按一次启动按一次停止的动作。
3.2 工作模式功能设置
打开“聚英翱翔 DAM 调试软件 ” 点击下方工作模式设置栏的“读取 ”和“设 置 ”就可以分别读取和设置工作模式。

4、闪开闪断功能及设置
4.1 、闪开闪断功能介绍
手动模式:对继电器每操作一次,继电器则翻转一次(闭合时断开,断开时闭合);
闪开模式:对继电器每操作一次,继电器则闭合 1 秒(实际时间【单位秒】=设 置数字*0. 1)后自行断开;
闪断模式:对继电器每操作一次,继电器则断开 1.秒(时间可调)后自行闭合;
4.2 、闪断闪开的设置
打开“聚英翱翔 DAM 调试软件 ”点击继电器模式后面下拉箭头进行模式的选择。
( 后 边 时 间 可 自 行 设 置 , 实 际 时 间 = 填 写 数 字 *0.1 【 单 位 秒 】 )

十、开发资料说明
1、通讯协议说明
本产品支持标准modbus 指令,有关详细的指令生成与解析方式,可根据本 文中的寄存器表结合参考《MODBUS 协议中文版》 即可。
本产品支持 modbus RTU 格式。
2、Modbus 寄存器说明
本控制卡主要为线圈寄存器,主要支持以下指令码:1 、5 、15
线圈寄存器地址表:
寄存器名称 | 寄存器地址 | 说明 |
线圈控制 |
线圈 1 | 00001 | 第一路继电器输出 |
线圈 2 | 00002 | 第二路继电器输出 |
线圈 3 | 00003 | 第三路继电器输出 |
线圈 4 | 00004 | 第四路继电器输出 |
光耦 1 | 10001 | 第一路光耦输入 |
光耦 2 | 10002 | 第二路光耦输入 |
光耦 3 | 10003 | 第三路光耦输入 |
光耦 4 | 10004 | 第四路光耦输入 |
光耦 5 | 10005 | 第五路光耦输入 |
光耦 6 | 10006 | 第六路光耦输入 |
光耦 7 | 10007 | 第七路光耦输入 |
光耦 8 | 10008 | 第八路光耦输入 |
循环控制 |
【JD1】 | 40001-40005 | [0001]:循环操作次数 [0002]:循环操作中闭合时间(ms) [0003]:循环操作中断开时间(ms) [0004]:闪断闪闭模式 4: 闪闭操作 2: 闪断操作 其他:无效操作 [0005]:闪开闪闭工作时间(ms) |
【JD2】 | 40006-40010 |
【JD3】 | 40011-40015 |
【JD4】 | 40016-40020 |
配置参数 |
通信波特率 | 41001 | 见下表波特率数值对应表,默认为 0 ,支持 0-6 ,该寄存器同时决定 RS232 和 RS485 的 通信波特率 |
备用 | 41002 | 备用,用户不可写入任何值。 |
设备组号 | 41003 | 用于扩展设备使用。 组号取值范围:0, 1,2,3,4,5,6,7 设备地址=设备组号*32+组内地址 |
备用 | 41004 | 用户可以使用,存储用户数据 |
备用 | 41005 | 用户可以使用,存储用户数据 |
只读参数 |
|
|
设备地址 | 31002 | Modbus 访问的地址 |
线圈输出状态 | 30002 | 1-16 |
线圈输出状态 | 30003 | 17-32 |
光耦输入状态 | 30004 | 1-16 |
光耦输入状态 | 30005 | 17-32 |
备注:
① :Modbus 设备指令支持下列 Modbus 地址:
00001 至 09999 是离散输出(线圈)
10001 至 19999 是离散输入(触点)
30001 至 39999 是输入寄存器(通常是模拟量输入)
40001 至 49999 是保持寄存器(通常存储设备配置信息)
采用 5 位码格式,第一个字符决定寄存器类型,其余 4 个字符代表地址。地址 1 从 0 开始,如 00001 对应 0000。
② :波特率数值对应表
数值 | 波特率 |
0 | 9600 |
1 | 2400 |
2 | 4800 |
3 | 9600 |
4 | 19200 |
5 | 38400 |
③ :继电器状态,通过 30002 地址可以查询,也可以通过 00001---00002 地址来查询,但控 制只能使用 00001---00002
地址。
30002 地址数据长度为 16bit 。最多可表示 16 个继电器。
对应结果如下:
Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
继 电 器 位置 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 |
即 寄存器 30009 数据 的 bit8 与寄存器 00001 的数据一样。
同理:光耦输入也是如此。寄存器 30003 的 bit8 、bit9 与寄存器 10001 、10002 都对应到指 定的硬件上。
寄存器地址按照 PLC 命名规则,真实地址为去掉最高位,然后减一。
3、指令生成说明
应用举例及其说明:本机地址除了拨码开关地址之外,还有默认的 254 为广
播地址。当总线上只有一个设备时,无需关心拨码开关地址,直接使用254 地址
即可,当总线上有多个设备时通过拨码开关选择为不同地址,发送控制指令时通 过地址区别。
注意:RS485 总线可以挂载多个设备。
指令可通过“聚英翱翔 DAM 调试软件 ”,的调试信息来获取。

指令生成说明:对于下表中没有的指令,用户可以自己根据modbus 协议生成,对于继 电器线圈的读写,实际就是对modbus
寄存器中的线圈寄存器的读写,上文中已经说明了继电器寄存器的地址,用户只需生成对寄存器操作的读写指令即可。例如读或者写继电器 1的状态,实际上是对继电器 1 对应的线圈寄存器 0001 的读写操作。
4、指令列表
情景 | RTU 格式(16 进制发送) |
查询八路状态 | FE 01 00 00 00 04 29 C6 |
查询指令返回信息 | FE 01 01 00 61 9C |
控制第一路开 | FE 05 00 00 FF 00 98 35 |
控制返回信息 | FE 05 00 00 FF 00 98 35 |
控制第一路关 | FE 05 00 00 00 00 D9 C5 |
控制返回信息 | FE 05 00 00 00 00 D9 C5 |
控制第二路开 | FE 05 00 01 FF 00 C9 F5 |
控制第二路关 | FE 05 00 01 00 00 88 05 |
控制第三路开 | FE 05 00 02 FF 00 39 F5 |
控制第三路关 | FE 05 00 02 00 00 78 05 |
控制第四路开 | FE 05 00 03 FF 00 68 35 |
控制第四路关 | FE 05 00 03 00 00 29 C5 |
查询八路光耦状态 | FE 02 00 00 00 08 6D C3 |
查询返回信息 | FE 02 01 00 91 9C |
5、指令详解
5.1 、继电器输出
控制 1 路继电器(以第一路开为例,其他通道参照本例)
发送码:FE 05 00 00 FF 00 98 35
字段 | 含义 | 备注 |
FE | 设备地址 | 这里为广播地址 |
05 | 05 指令 | 单个控制指令 |
00 00 | 地址 | 要控制继电器寄存器地址 |
FF 00 | 指令 | 继电器开的动作 |
98 35 | CRC16 | 前 6 字节数据的CRC16 校验和 |
继电器卡返回信息:
返回码:FE 05 00 00 FF 00 98 35
字段 | 含义 | 备注 |
FE | 设备地址 | 这里为广播地址 |
05 | 05 指令 | 单个控制指令 |
00 00 | 地址 | 要控制继电器寄存器地址 |
FF 00 | 指令 | 继电器开的动作 |
98 35 | CRC16 | 前 6 字节数据的CRC16 校验和 |
5.2 、继电器状态
查询4 路继电器
发送码:FE 01 00 00 00 04 29 C6
字段 | 含义 | 备注 |
FE | 设备地址 | 这里为广播地址 |
01 | 01 指令 | 查询继电器状态指令 |
00 00 | 起始地址 | 要查询的第一个继电器寄存器地址 |
00 08 | 查询数量 | 要查询的继电器数量 |
29 C6 | CRC16 | 前 6 字节数据的CRC16 校验和 |
继电器卡返回信息:
返回码:FE 01 01 00 61 9C
字段 | 含义 | 备注 |
FE | 设备地址 |
|
01 | 01 指令 | 返回指令:如果查询错误,返回 0x81 |
01 | 字节数 | 返回状态信息的所有字节数。1+(n-1)/8 |
00 | 查询的状态 | 返回的继电器状态。 Bit0:第一个继电器状态 Bit1:第二个继电器状态 。。。。。。。 Bit7:第八个继电器状态 |
61 9C | CRC16 | 前 6 字节数据的CRC16 校验和 |
5.3 、光耦输入
查询光耦
发送码:FE 02 00 00 00 08 6D C3
字段 | 含义 | 备注 |
FE | 设备地址 |
|
02 | 02 指令 | 查询离散量输入(光耦输入)状态指令 |
00 00 | 起始地址 | 要查询的第一个光耦的寄存器地址 |
00 08 | 查询数量 | 要查询的光耦状态数量 |
6D C3 | CRC16 |
|
光耦返回信息:
返回码:FE 02 01 01 50 5C
字段 | 含义 | 备注 |
FE | 设备地址 |
|
02 | 02 指令 | 返回指令:如果查询错误,返回 0x82 |
01 | 字节数 | 返回状态信息的所有字节数。1+(n-1)/8 |
01 | 查询的状态 | 返回的继电器状态。 Bit0:第一个光耦输入状态 Bit1:第二个光耦输入状态 。。。。。。。 Bit7:第八个光耦输入状态 |
50 5C | CRC16 |
|
5.4 、闪开闪闭指令
闪开闪闭指令解析
闪开发送码:FE 10 00 03 00 02 04 00 04 00 0A 00 D8
闪断发送码:FE 10 00 03 00 02 04 00 02 00 14 21 62
字段 | 含义 | 备注 |
FE | 设备地址 |
|
10 | 10 指令 | 查询输入寄存器指令 |
00 03 | 继电器地址 | 要控制的器地址 |
00 02 | 控制命令数 量 | 要对继电的命令个数 |
04 | 字节数 | 控制信息命令的的所有字节数。1+(n-1)/8 |
00 04 或 00 02 | 指令 | 00 04 为闪开指令 00 02 为闪闭命令 |
00 0A | 间断时间 | 00 0A 为十六进制换为十进制则为 10 间隔时 间为(0. 1 秒*10) |
00 D8 | CRC16 | 校验方式 |
返回码:FE 10 00 03 00 02 A5 C7
FE | 设备地址 |
|
10 | 10 指令 | 返回指令:如果查询错误,返回 0x82 |
00 03 | 设备地址 | 查询设备的地址 |
00 02 | 接收命令数 | 设备接受的命令个数 |
A5 C7 | CRC16 | 校验位 |
5.5 、全开全关指令
全开全关指令解析
全开发送码:FE 0F 00 00 00 04 01 FF 31 D2
全断发送码:FE 0F 00 00 00 04 01 00 71 92
字段 | 含义 | 备注 |
FE | 设备地址 |
|
0F | 0F 指令 | 返回指令:如果查询错误,返回 0x82 |
00 00 | 起始地址 |
|
00 04 | 控制数量 | 控制的继电器数量 |
01 | 字节数 | 发送命令字节数 |
FF (或 00) | 全开全关命令 | FF 全开命令 00 全关命令 |
31 D2 (或 71 92) | CRC16 | 校验位 |
全开返回码:FE 0F 00 00 00 04 40 07
全断返回码:FE 0F 00 00 00 04 40 07
字段 | 含义 | 备注 |
FE | 设备地址 |
|
0F | 0F 指令 | 返回指令:如果查询错误,返回 0x82 |
00 00 | 起始地址 |
|
00 04 | 数量 | 返回信息的继电器数量 |
40 07 | CRC16 | 校验位 |
十一、常见问题与解决方法
1 、继电器板卡供电后使用232 接口无法建立通信,无法控制
首先测试不同波特率是否可以控制,485 接口注意 A+ 、B-线以及屏蔽线,屏蔽线不是
必须,但在通信误码率大的情况下必须接上,即便距离很近也可能出现此类情况。
2 、总线,挂载了大于 1 个的设备,我以广播地址 255 发送继电器 1 吸和,但并不是所有模 块的继电器 1 吸和。
广播地址在总线上只有一个设备时可以使用,大于 1 个设备时请以拨码开关区分地址来
控制,否则会因为模块在通信数据的判断不同步上导致指令无法正确执行。
3 、西门子 PLC 与设备不能正常通讯
西门子 485 总线 AB 定义与设备相反。











 官方微信
官方微信
 天猫店铺
天猫店铺
 京东店铺
京东店铺